Jetson nano/Raspberry自启动设置以及取消sudo
闲鱼搜用户:闪烁的白茶,提供专业技术代做
更多Jetson Nano安装并使用PyQt5进行界面开发设计
闲鱼搜用户:闪烁的白茶,提供专业技术代做
更多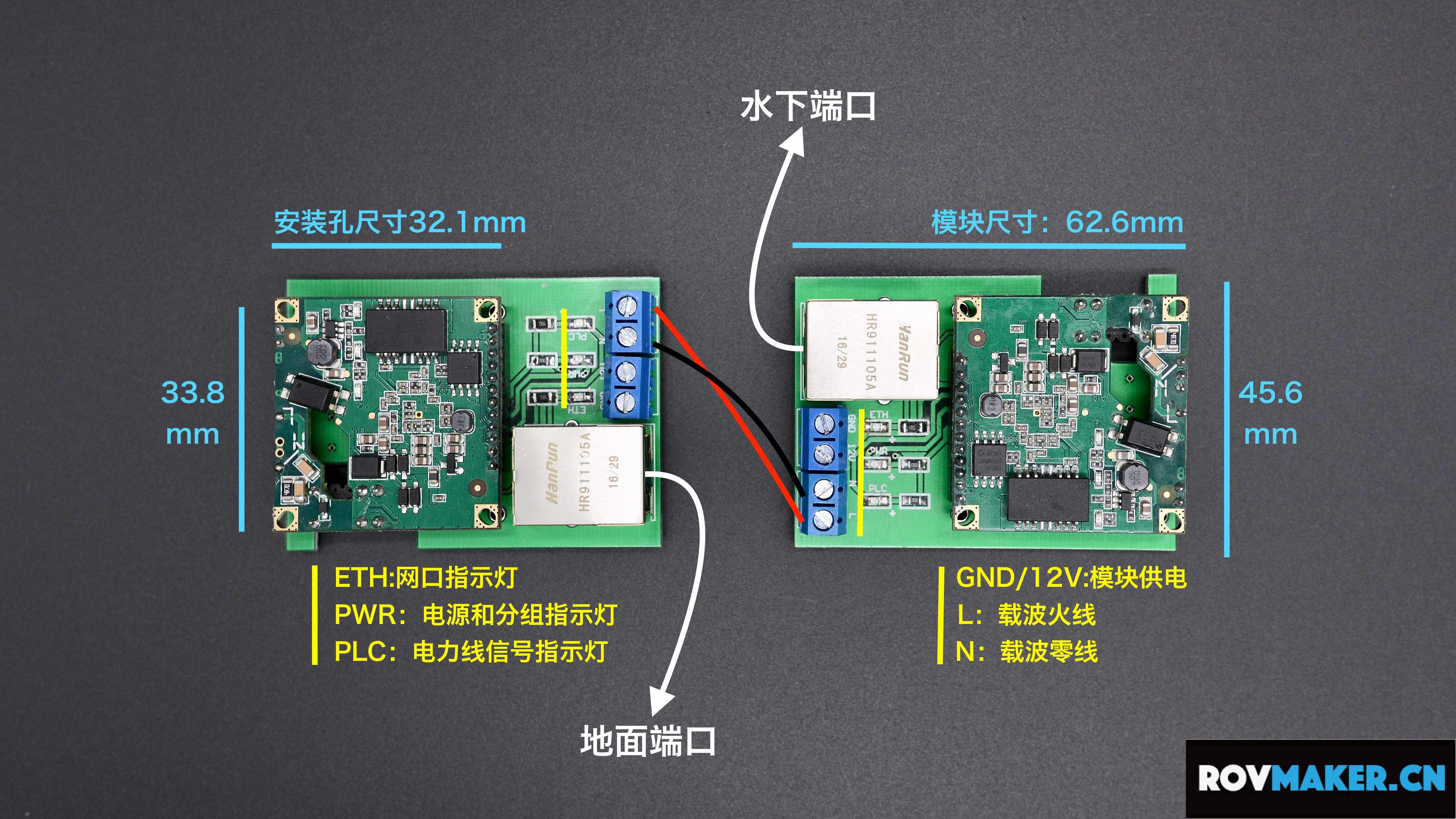
基于电力载波的TCP通信实现
问题背景 这是我在做海草移植项目过程中需要实现的功能——使用电力载波连接Jetson Nano与Raspberry实现信息互通,写下此篇博客以作记录 一、TCP通信 1.1 简单介绍 TCP协议,传输控制协议(英语:Transmission Control Protocol,缩写为:TCP)是一种面向连接的、可靠的、基于字节流的通信协议。 TCP把连接作为最基本的抽象单元,每条TCP连接有两个端点,TCP连接的端点即套接字。 套接字: socket = (IP地址 + 端口号) TCP连接:{socket1, socket2}={(IP1:port1), (IP2:port2)} TCP提供全双工通信。 详细解释可参考网上资料。 1.2 一般用法 进行TCP通信的两端设备必须要在同一区域网或者网段内。如果..
更多关于在Jetson部署Yolov5实现检测与串口通信传送位置信息
闲鱼搜用户:闪烁的白茶,提供专业技术代做
更多
cmake学习记录
问题背景 这个问题是我在做海赛C2比赛编写部署自动打靶算法遇到的。先简单叙述一下起因,由于我们C2队伍使用的是Jetson Nano来识别靶心,进而实现自动打靶功能,于是算法识别这方面就由我来进展。在网上参考了一些部署方案。最终选择了使用Deepstream架构运行yolov5n的trt模型进行识别检测。但是由于我们的需求不仅是检测到靶心,还要将检测到的靶心的位置传递给下位机stm32,因此我需要在该架构中加入串口通信模块,实现该功能。由于Deepstream在国内的相关资料很少,故需要自己去了解并实现添加该模块到这个框架中。而且其代码基本都是C++代码,过程中要用到cmake等编译工具,故而接触到了cmake相关文件的编写与使用,并写下该篇博客对其进行记录。 一、cmake是什么 CMake是一个跨平台..
更多
关于如何使用Hexo搭建自己的Github网站
一、下载Git与Nodejs 这里可以自行参考网上教程下载 二、使用hexo创建个人博客 2.1 创建Blog根目录 在本地创建一个文件夹,此文件夹将用来管理你的个人博客网站,如下图,我再F盘创建了一个git_blog文件夹 然后打开Git bash并输入cd F:/git/blog,如下图 然后再输入命令 npm install hexo-cli -g hexo init 其中hexo init命令可能会失败,可以多试几次,最好挂梯子运行 全部输入完后,可以发现当前文件夹下多出一些文件夹和相关配置文件。 关于这些文件夹,可以先做一个简单的介绍: node_modules: 依赖包 public:存放生成的页面 scaffolds:生成文章的一些模板 source:用来存放你的文章 them..
更多关于Jetson的系统烧录与环境配置
闲鱼搜用户:闪烁的白茶,提供专业技术代做
更多
成功解决Pytorch模型转trt模型中得BatchNorm问题
问题背景 如果你想把你的模型投入到应用中或者是想提升模型的运行速度,除了对网络进行压缩、蒸馏外,最好的方法就是将模型转成tensor模型,使用tensorrt实现对网络的加速。但是当该模型的功能是图像增强或者是图像生成,并且模型中运用了大量的batchnorm2d函数,运用网上现成的方法会发现模型转成onnx以及trt后,模型的处理效果大幅下降,想解决此问题就可以详细往下看了: 我们的方法顺序是:pytorch模型先转成onnx模型,接着将onnx模型转成trt模型 一、pytorch to onnx 核心代码: import torch from torchvision.utils import save_image import os from nets.tiny_unet_2_channelxian..
更多